启动xv6创建第一个进程
Xv6启动过程
-
xv6通电后先完成初始化
-
运行存储在ROM中的boot loader
-
boot loader将xv6 kernel加载到memory中。kernel被加载到0x80000000处,之所以不加载到0x0处是因为在0x0:0x80000000之间包含了I/O设备。(此时分页硬件被disable了,虚拟地址直接对应物理地址)
-
在machine mode下,CPU从
_entry(kernel/entry.S:6)开始执行xv6。_entry的作用是为C代码的运行指定栈。在start.c中, xv6声明了初始stack的空间stack0。_entry中的代码将地址stack0+4096加载到stack pointer registersp,也就是栈顶的地址。
# qemu -kernel loads the kernel at 0x80000000 |
- 接着,
_entry跳转到start的C代码。start做了一些只能在machine mode下做的配置。他还初始化计时器中断。接着,他切换到supervisor mode。为了转换到supervisor mode, RISCV提供了mret指令。这个指令通常是用来从一个之前supervisor mode转换到machine mode的调用返回。但start并没有从一个这样的调用返回,他假装自己从这样的一个调用返回。他在registermstatus中将之前的privilege mode设置为supervisor mode,在registermepc中将main的地址设置为返回的地址,在page-table registersatp中写入0来disable虚拟地址转换,并且将所有的interrupts和exceptions授权给supervisor mode
|
- 调用
mret后,program counter切到main(kernel/main.c:11), 在supervisor mode在运行。
|
main初始化了一些设备和子系统,通过调用userint(kernel/proc.c:212)创建了第一个process
// a user program that calls exec("/init") |
- 第一个进程执行了一个用RISC-V汇编写到小程序
initcode.S(user/initcode.S:1)。他通过系统调用exec重新进入kernel。exec执行了一个新的程序/init。/init创建了一个控制台设备文件,并作为文件描述符0,1,2来打开它。然后在无限循环中,启动shell并处理僵尸进程。系统就这样启动了。
# Initial process that execs /init. |
GDB - 管中窥豹
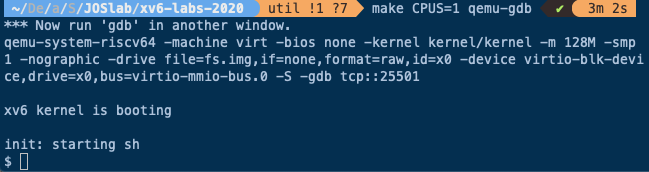
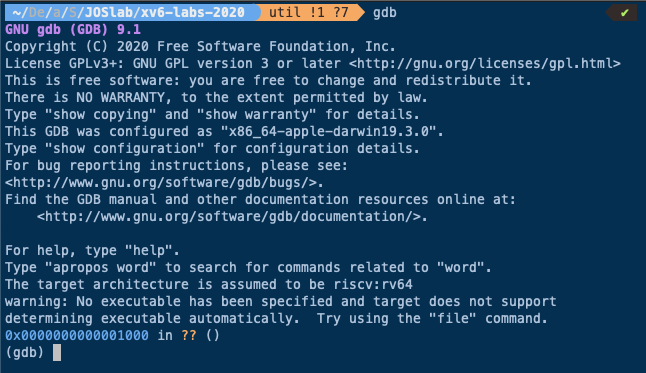
首先,启动QEMU,并打开gdb。本质上来说QEMU内部有一个gdb server,启动之后,QEMU会等待gdb客户端连接。然后在计算机上再启动一个gdb客户端

b _entry在程序的入口处设置一个断点。

程序的起始位置应该是0x80000000, 但事实上,这里的breakpoint设置在了0x8000000a
c 运行程序,停在了0x8000000a, 此处的指令为csrr a1, mhartid, 这条指令读取了控制系统寄存器(Control System Register)mhartid,并将结果加载到a1寄存器。QEMU会模拟执行这条指令,之后执行下一条指令。

XV6从entry.s开始启动,运行在machine mode下,这个时候没有内存分页,没有隔离性。XV6运行start.c后切换到supervisor mode, 然后准备运行main.c。我们在main函数设置一个断点,main函数已经运行在supervisor mode了。接下来运行程序,程序会在main函数的第一条指令停住。

接下来,输入layout split在gdb的layout split模式下运行,从这个视图可以看出gdb要执行的下一条指令是什么,断点具体在什么位置。
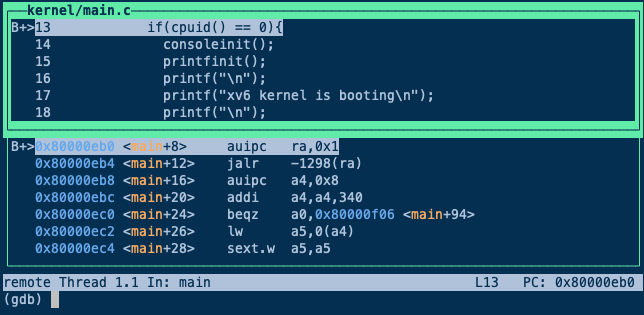
这里只在一个CPU上运行QEMU(见最初的make参数),这样会使得gdb调试更加简单。因为现在只指定了一个CPU核,QEMU只会仿真一个核,可以单步执行程序(因为在单核或者单线程场景下,单个断点就可以停止整个程序的运行)
在gdb中输入n,可以执行到下一条指令。这里调用了一个名为consoleinit的函数,他的功能是设置好console。一旦console设置好了,接下来可以向console打印输出(代码16、17行)。执行完16、17行之后,可以在QEMU看到相应的输出。
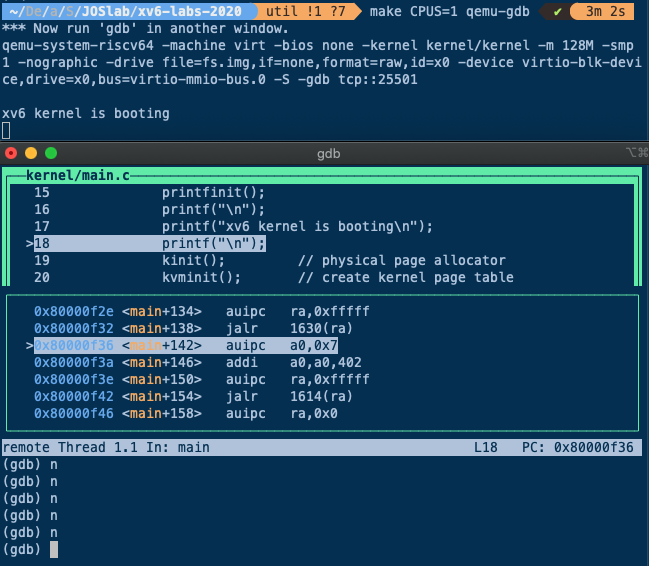
除了console之外,还有许多代码来做初始化
kinit:设置好页表分配器(page allocator)kvminit:设置好虚拟内存kvminithart:打开页表processinit:设置好初始进程或者说设置好进程表单trapinit/trapinithart:设置好user/kernel mode转换代码plicinit/plicinithart:设置好中断控制器PLIC(Platform Level Interrupt Controller),我们后面在介绍中断的时候会详细的介绍这部分,这是我们用来与磁盘和console交互方式binit:分配buffer cacheiinit:初始化inode缓存fileinit:初始化文件系统virtio_disk_init:初始化磁盘userinit:最后当所有的设置都完成了,操作系统也运行起来了,会通过userinit运行第一个进程,这里有点意思,接下来我们看一下userinit
userinit函数启动了一个进程,调用exec系统调用运行了一个小程序 (定义在initcode数组中,左边所示,对应的汇编程序如右边所示)
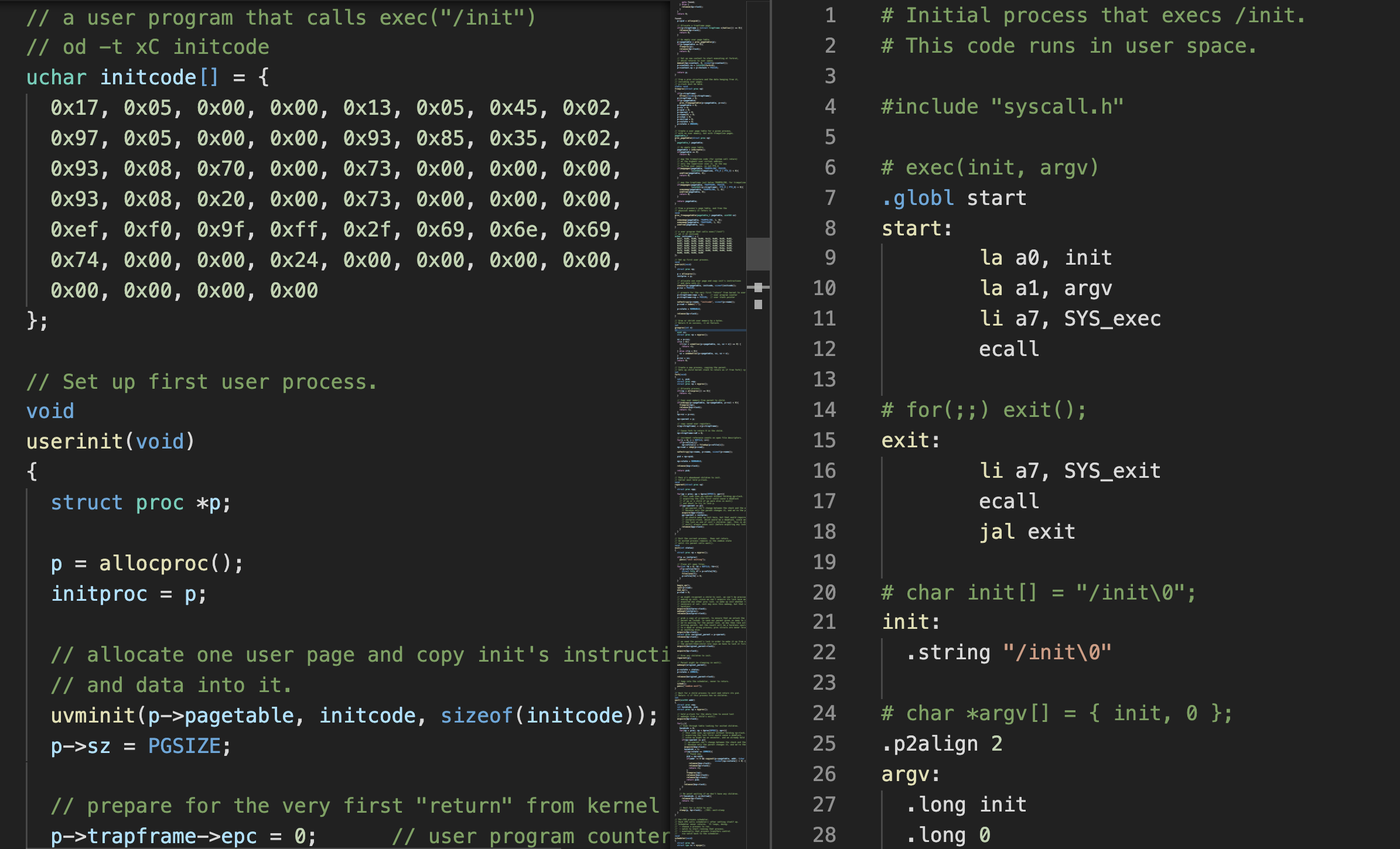
这个汇编程序中,它首先将init中的内容的指针加载到a0(la a0, init),argv中的地址加载到a1(la a1, argv),exec系统调用对应的数字加载到a7(li a7, SYS_exec),最后调用ECALL。所以这里执行了3条指令,之后在第4条指令将控制权交给了操作系统。
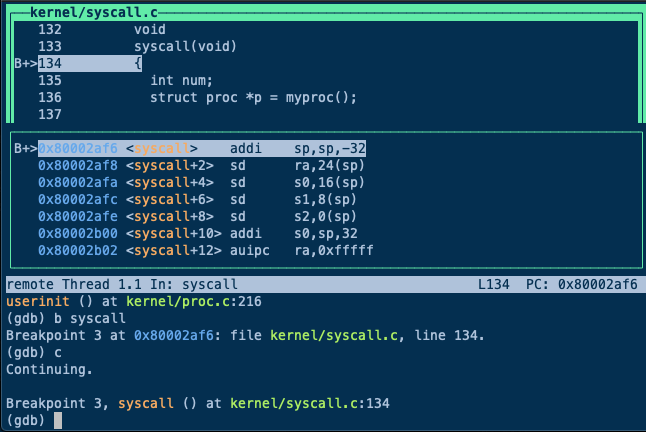
如果在syscall中设置一个断点,

并让程序运行起来。userinit会创建初始进程,返回到用户空间,执行刚刚介绍的3条指令,再回到内核空间。这里是任何XV6用户会使用到的第一个系统调用。
通过在gdb中执行c,让程序运行起来,我们现在进入到了syscall函数。
void |
num = p->trapframe->a7 会读取使用的系统调用对应的整数。当代码执行完这一行之后,我们可以在gdb中打印num,可以看到是7
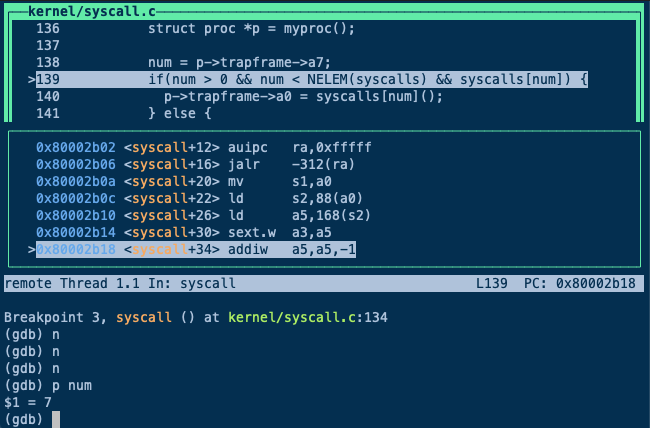
如果我们查看syscall.h,可以看到7对应的是exec这个系统调用。
// System call numbers |
所以,这里本质上是告诉内核,某个用户应用程序执行了ECALL指令,并且想要调用exec系统调用。
p->trapframe->a0 = syscall[num]() 这一行是实际执行系统调用。这里可以看出,num用来索引一个数组,这个数组是一个函数指针数组,可以预期的是 syscall[7]对应了exec的入口函数。
跳到sys_exec函数中
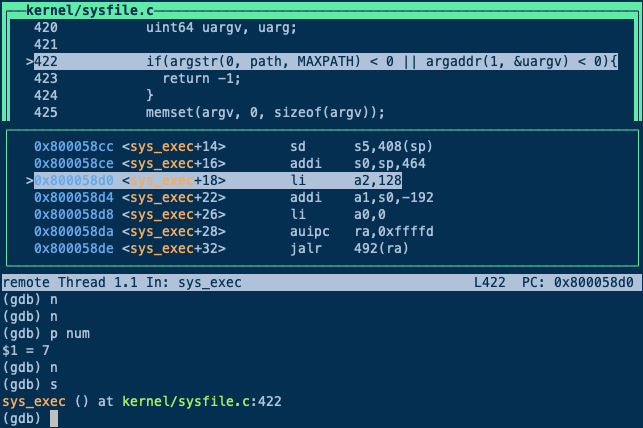
sys_exec中的第一件事情是从用户空间读取参数,它会读取path,也就是要执行程序的文件名。这里首先会为参数分配空间,然后从用户空间将参数拷贝到内核空间。之后我们打印path,
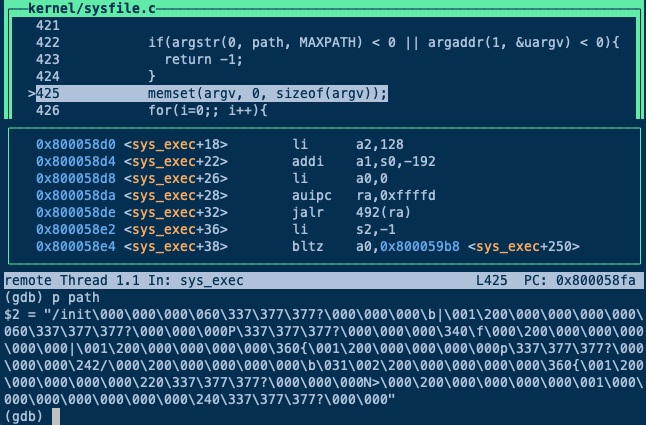
可以看到传入的就是init程序。所以,综合来看,initcode完成了通过exec调用init程序。
再来看init程序,
// init: The initial user-level program |
init会为用户空间设置好一些东西,比如配置好console,调用fork,并在fork出的子进程中执行shell。
最终的效果就是Shell运行起来了。如果再次运行代码,还会陷入到syscall中的断点,并且同样也是调用exec系统调用,只是这次是通过exec运行Shell。当Shell运行起来之后,可以从QEMU看到Shell。